WLKATA MIROBOT
輕鬆有趣地學習物聯網 (AIoT) 人工智能

WLKATA Mirobot 緊湊、安全且有趣,是學習和展示新興機器人和智能工廠概念和技術的可愛媒介。
Mirobot 輕便小巧的規格,多領域的場景應用,加上合理的價格與穩定的品質,盡心盡力成為你每次創作的得力助手。
Mirobot 還可以運用在 教育、實驗 或影像拍攝等多種領域中。
Mirobot 還可以運用在 教育、實驗 或影像拍攝等多種領域中。
|
|
|

|
|
機器人與 AIoT 教育
|
6+1 自由度高精度
|
開源平台
|
工業 4.0 模擬
|
專為智能工廠模擬 和
|
|

|
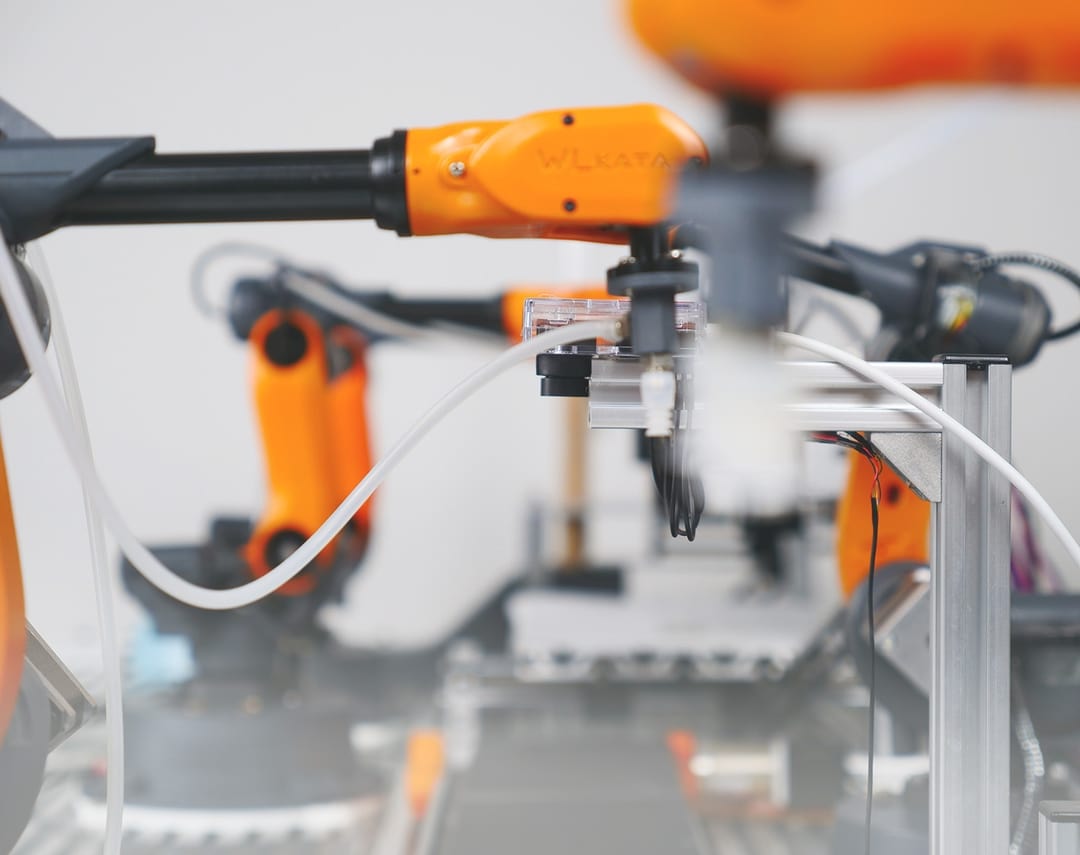
6+1 自由度和專業性能WLKATA Mirobot 採用 6+1 自由度設計,與典型的工業機器人相同,因此幾乎是所有製造和家庭用途的展示所必需的。
❶ 6 自由度 ❷ 0.2mm 重複性 ❸ 關節採用高精度步進電機和減速機 |
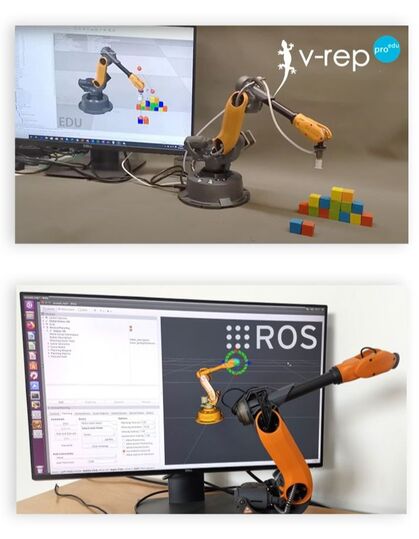
開源且對創客友好WLKATA Mirobot 的固件基於 Arduino。它是開源的,支持可定制的 API、RS485、藍牙和 WiFi。這樣用戶就可以通過USB串口進行操作,例如定制自己的控制器。
❶ 兼容PLC RS485、WIFI、藍牙 ❷ 用於任何級別定制的開放 API ❸ 支持ROS、Matlab、V-Rep、Python SDK等 |
|
|
|
高級運動控制算法基於前瞻算法,通過執行連續的小線段運動來保證運動控制的穩定性。
|
用於創建智能工廠理念的各種配件!豐富多樣的終端工具、無線控制器、傳送帶、滑軌、AI視覺套件、漫遊車等,年輕工程師可以在桌面上創造無限的未來生活場景。
|

|
|
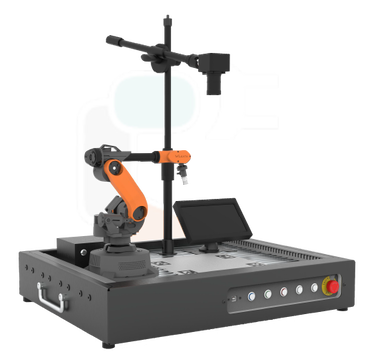
人工智能視覺套件
人工智能視覺套件是一套基於Python編程機器視覺 套件。相對於較複雜的基於Ubantu的機器視覺而言, AI視覺套件是一款入門級機器視覺產品。AI視覺套件 可實現顏色識別、輪廓識別、圖片識別、數字識別、二 維碼識別、人臉識別等功能。可與Mirobot機械臂結 合實現物塊、卡片的自動識別與抓取功能。
|
|
|
機器視覺機器人套件
深度學習視覺套件是一款基於Jetson Nano的機器 學習視覺套件,採用開源的深度學習框架PyTorch,配合跨界平台的電腦視覺庫OpenCV。 套件與Mirobot機械臂結合可實現目標檢測、圖像 識別等AI功能。
|
|
Mirobot移動機器人套件
Mirobot移動機器人套裝 - 可搭載機械臂的AGV麥 倫移動底盤擴展了機械臂的應用場景。 AGV麥倫全向移動小車兼容創客創作,具有豐富的 傳感特性。支持藍牙、WIFI連接方式,支持二次開發。
|

|


|
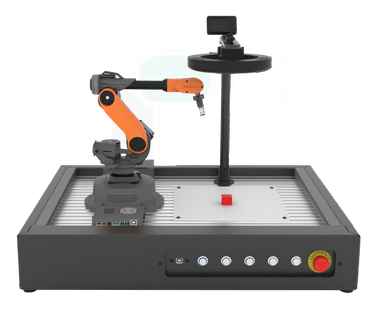
IOA數字孿生機械臂套件
IOA數字孿生機械臂套件 — IOA數字孿生系統與Mirobot結合可實現1:1的虛擬化仿真,自定義拖拽式設計 機器人工作站產線;1:1的虛實孿生控制仿真;與實體工作站對應,能夠實現人手一機產業結合的仿真應用。 IOA數字孿生軟體支持搭建學生學習管理系統,方便學習進度跟踪與評分。
|
智能工廠 應用廣泛

|
智能工廠—水果採摘產線項目內容:為提高生產效率,農業自動化受到國家越來越多的重視,目前多個國家研究所及高校就農業採摘展開研究。 水果採摘產線主要結合小型工業原型六軸桌面機械臂與顏色識別模塊,通過機械臂採摘,傳感器識別,實現 水果採摘、分揀過程。 本套產線主要培養機器人、傳感器技術在農業領域應用思維,為在智慧農業領域進行學習、研究提供支持。
延伸應用:結在完成基礎水果採摘任務後,可通過增加果樹、滑軌套件、視覺套件等硬體,進一步開發出更豐富、更複雜的智慧農業應用場景。 |
|
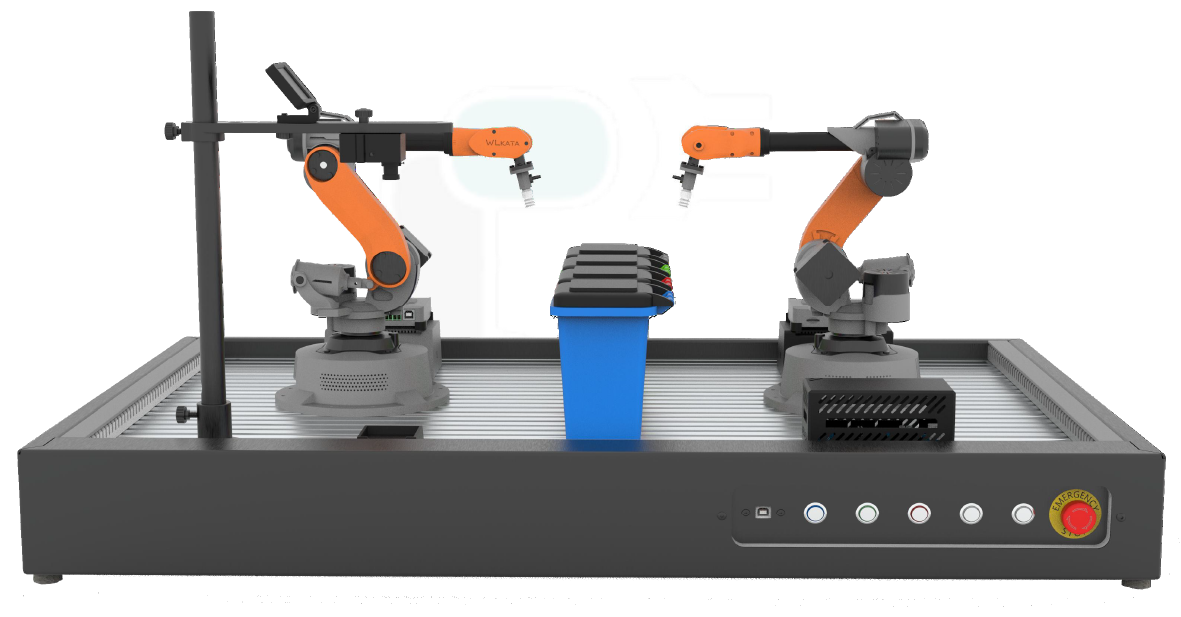
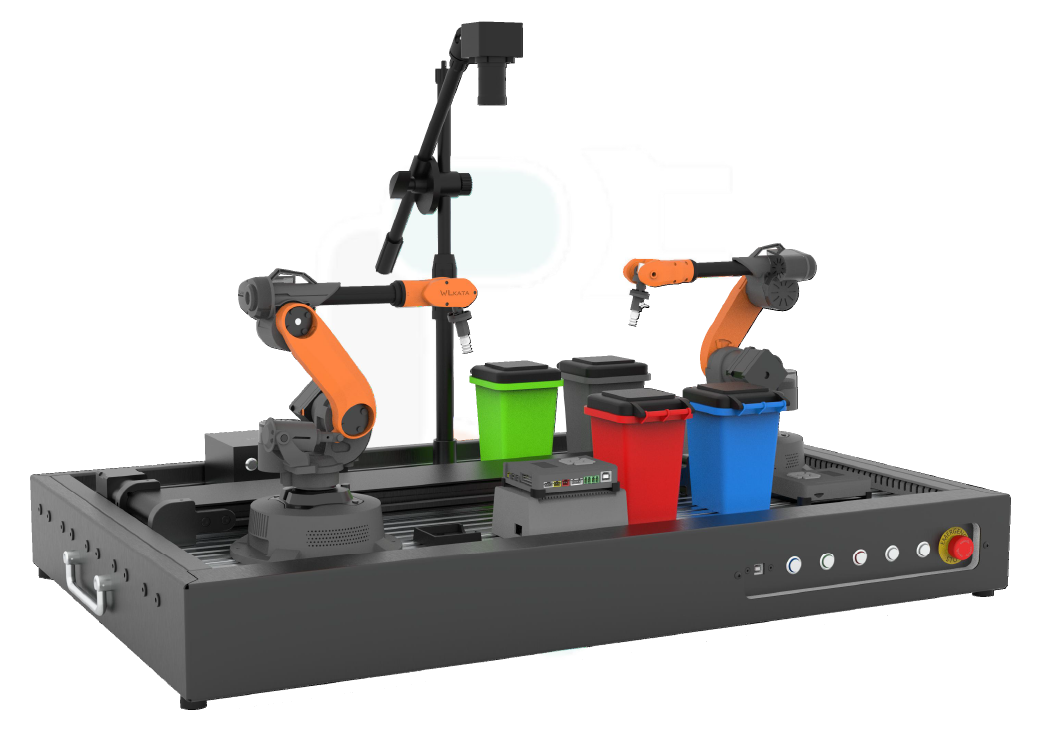
智能工廠—智慧垃圾分揀產線項目內容:智慧垃圾分揀結合Mirobot六軸桌面機械臂、AI視覺套件實現不同類垃圾識別、機械臂分揀任務。通過完成 產線整套工作流程提升Python編程能力及機械臂編程及協同工作能力。
延伸應用: AI視覺套件還可以完成形狀、掃碼等視覺識別功能,通過增加傳送帶、滑軌套件可搭建更為複雜的物流等自動化場景。 |
|
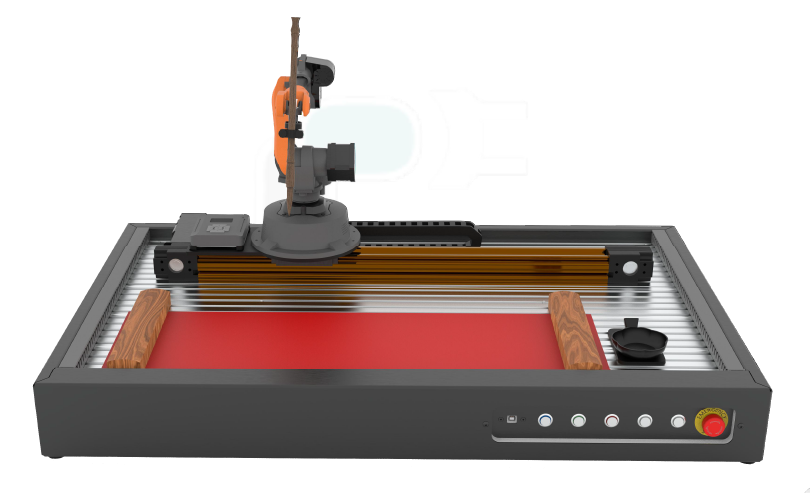
智能工廠—書法寫作套件 項目內容:WLkata書法套件由Mirobot桌面六軸機械臂、滑軌套件、書法配件包組成。通過仿真軟體實現字體軌跡規劃 實現書法創作。套件融合傳統書法藝術知識與機器人編程及路徑規劃技術,更好體驗科技與傳統藝術融合的 樂趣。
延伸應用:Vrep是全球機器人學習與仿真的常用軟體,不僅可以實現機器人書法寫作,還可以根據學生自身傳意設計更複雜的仿真,比如空間書法寫作等等。 |
|
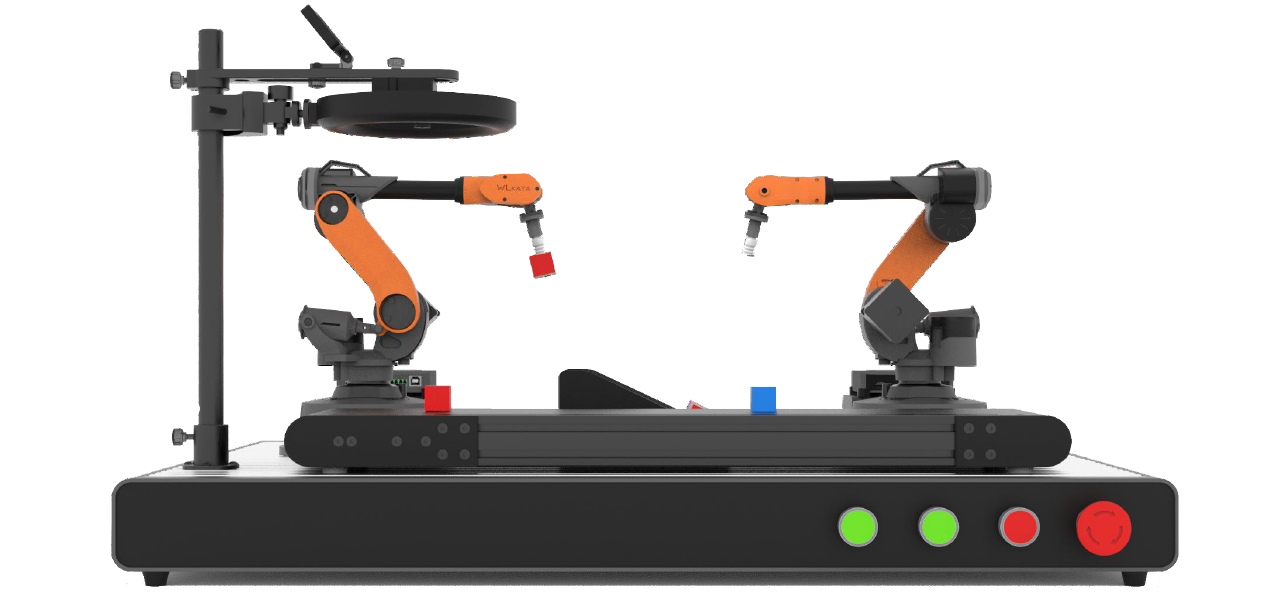
智能工廠—人工智能分揀產線
項目內容:人工智能分揀產線在由AI視覺套件、機械臂、傳送單元及傳感器單元組成,目標物體動態情況下進行特徵識別,視覺套件與機械臂進行分揀任務,使機械臂具備智能分揀功能。
延伸應用:人工智能技術的應用面臨复雜的工作環境,人工智能分揀產線可提高學生在實驗過程中搭建系統的實踐能力。可通過增加滑軌套件,改變識別類型創建更複雜的應用場景,提升創新開發能力。 |
|
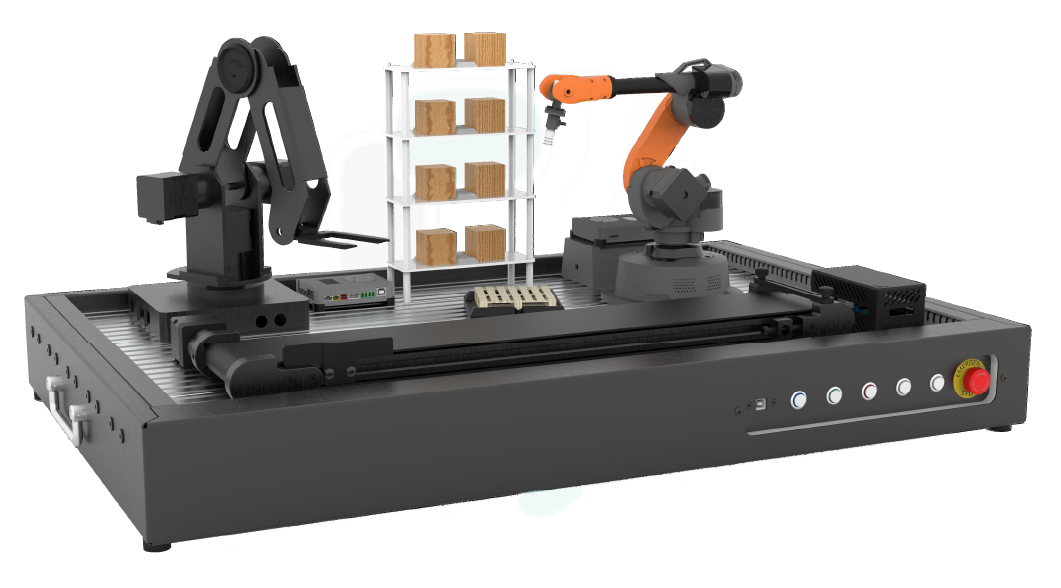
智能工廠—物流倉儲產線
項目內容:物流倉儲產線模擬上貨、碼垛、裝載等倉儲全流程的智能物流場景。本場景主要學習mirobot機械臂的編程 控制與多機協同。碼垛機械臂將貨架上的貨物碼放在托盤上,傳送帶將貨物運送至 3 軸搬運機械臂的工位, 搬運機械臂將貨物搬運至貨架前,並由碼垛機械臂將貨物碼放回貨架,產線通過以上步驟的循環來模擬展 示工業的智慧物流倉儲系統。
延伸應用:可增加滑軌套件、視覺套件等實現更複雜智慧工廠開發。同時可以將場景延伸至農業、物流等多個行業。 |
|
智能工廠—汽車裝配產線
項目內容:工業機器人在汽車製造行業應用最為廣泛。汽車生產智慧工廠集成了智能控制、傳感器等多種人工智能技 術。真實的汽車生產場景,形象的展示了汽車裝配、焊接、組裝等多項工藝。
汽車裝配線是人和機器的有效組合,最充分體現設備的靈活性,它將輸送系統、隨行夾具和在線專機、測試 備有機的組合,以滿足汽車零件的裝配要求。 延伸應用:通過增加AI視覺套件及更 多末端工具設計等可實現汽車焊點檢 測、噴漆等功能,搭建更為全面的汽 車裝配產線。 |
|
智能工廠—深度學習動態分揀產線
項目內容:Mirobot智能識別系統是一款基於Jetson Nano的多功能AI智能機械臂,採用開源的深度學習框架PyTorch,配合跨界平台的計算機視覺庫OpenCV,具備目標檢測、圖像識別等AI功能,可配合傳送帶實現智能垃圾分類。
延伸應用:通過機器學習訓練可實現多種實物分揀,通過訓練實物分揀可大大提昇機器視覺專業知識能力。 |
|
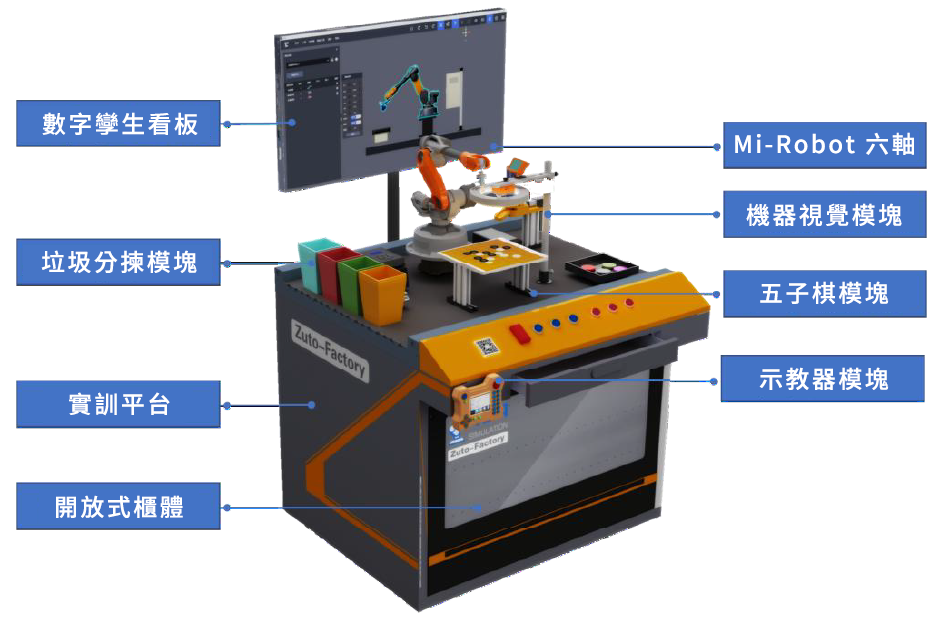
智能工廠--IOA機器人綜合實訓工作站
項目內容:IOA機器人綜合實訓工作站包含了機器視覺控制系統、機器視覺仿真係統、六軸機器人、工控機系統以及3D 數字孿生系統,該平台採用模塊化方式組成,並配套數字化看板和實訓台,形成對機器人的高級集成和綜合 應用的實訓仿真平台。
|
|
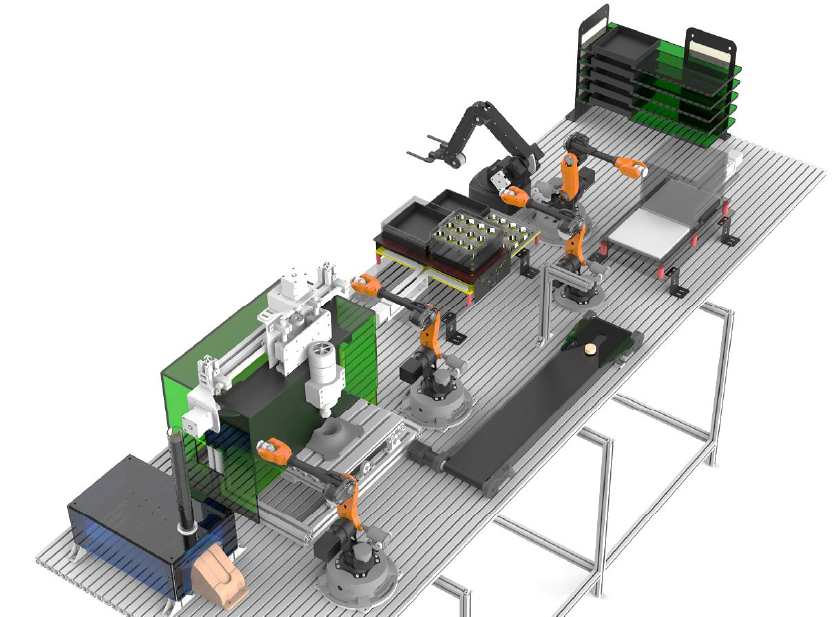
智能工廠—象棋智造產線
項目內容:象棋智造產線完整呈現機器人在智能製造中的應用。整套方案包含象棋原料單元、激光雕刻生產單元、Mirobot機械臂搬運單元、傳送帶搬運單元、組裝與倉儲單元。實際智能製造中,整套方案採用一體化控制, 項目功能單元化的形式呈現。一體化控制保證了這個生產方案得流暢性。功能單元化方便生產調試。
延伸應用:可通過改變生產工藝實現書簽、名片等多種產品的工業定制。 |
|
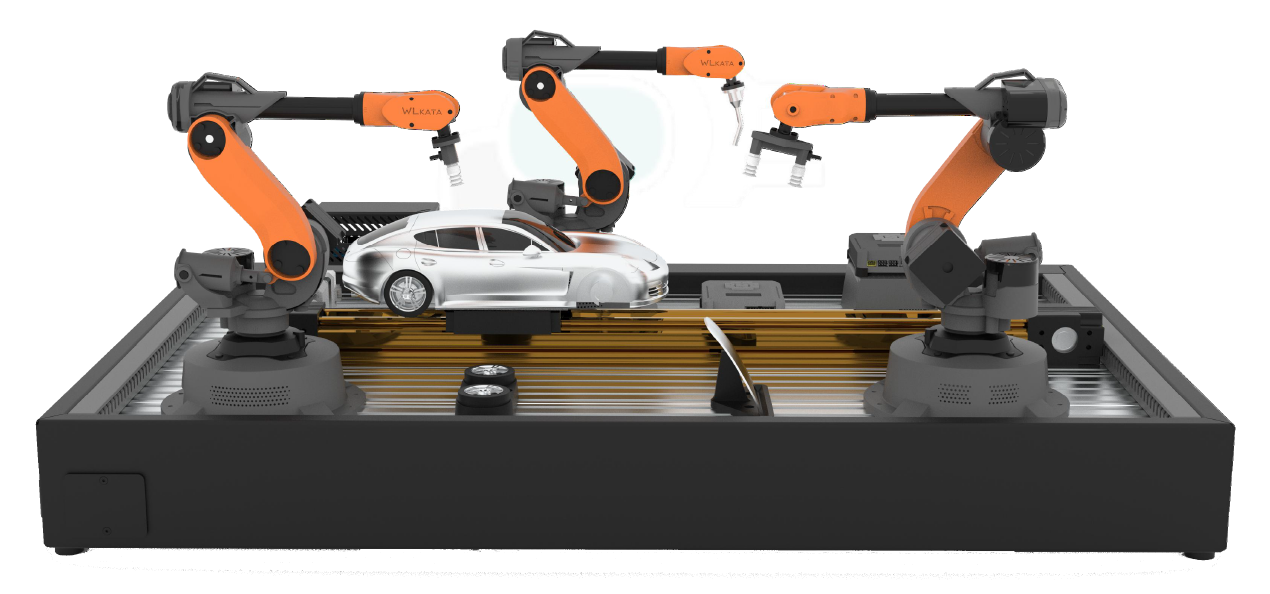
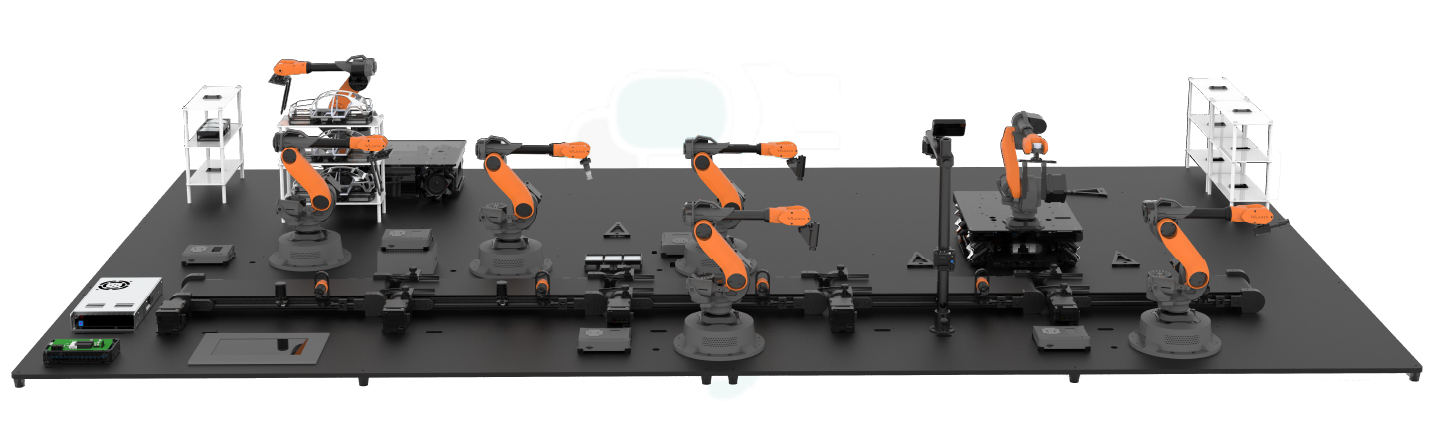
智能工廠—汽車模擬生產製造產線
項目內容:為更好地迎合工業柔性生產以及實現還原出汽車生產過程中的“拼裝、焊接、焊點檢測、打磨”等自動化生產工 藝流程,形成一套完整的汽車產線生產方案。整套產線以單元設備節點為基礎,同時進行實時一體化控制、視 覺檢測、數據收集與處理,通過視覺檢測以及節點本身的數據回傳獲得反饋,由主控進行調度,分派AGV進行 取料或修補等操作。代碼可以通過WLkata Studio存儲至多功能控制盒,方便學生根據場景進行修改,為學生 學習機器人編程與控制及智能製造系統工程提供了一個安全、開放、友好的平台。
延伸應用:產線提供RS485、WIFI等多種通訊方式。可通過對場景進行邊緣計算、模擬仿真實現汽車工業物聯網多種技術科研與學習工作。大大提昇機器視覺專業知識能力。 |
多元設計 豐富規格
|
6軸操作空間加持

Mirobot 是最小的6軸工業機械手臂。這種兼顧靈活水準以及高難度自由旋轉的設計,相比傳統3軸或4軸機器,讓你不管在水平軸還是垂直軸上都能擁有更多的空間。
|
4種末端控制器可選
所有機械臂能夠實現最大化的基礎,在於末端控制器的相容性多寡。Mirobot 末端控制器相容三指柔爪、寫字套件、舵機夾爪、單雙指吸盤等多種裝置。當然 GoPro也完全沒問題!
|
|
0.2mm精度掌控

加上0.2mm的重複精度,確保作業中的每個重複動作都非常精準。
|
110°/S 擺臂角速度
特有的6 軸操作空間,讓你的擺臂角度達到 110°/s。
可以作業更多空間,操作更多角度。 |
產品規格
|

|

|
|
|
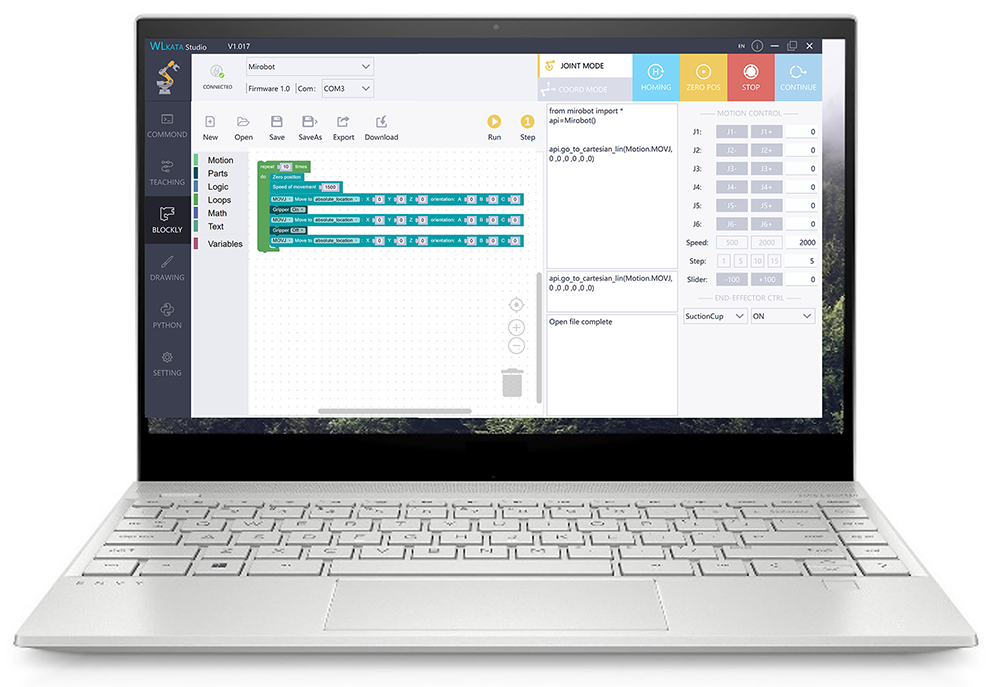
概述
|
WLKATA Studio 是一款為機器人學習者提供基本控制功能的軟體。
|
初學者學習機器人控制的簡單方法,並像工業機器人挂件一樣工作。
|
WLKATA Mirobot 固件允許用戶通過使用 USB 串行來操作機械臂。
|
學習包,包括 Ubuntu 16.04 ROS Kinetic、Matlab 和 V-Rep 的 3D 模型和控制演示
|
|
操作系統
|
Windows/MacOS
|
Windows/MacOS/Linux
|
Window/MacOS/Linux
|
ROS:Linux
Matlab:Windows V-Rep:Windows |
|
語言
|
Python/Blockly/G 代碼
|
G代碼
|
任何可以通過 USB 串行通信的語言
|
C++、Python 和其他與 ROS、Matlab 和 V-Rep 兼容的語言
|
|
控制器
|
WLKATA Mirobot 固件
|
WLKATA Mirobot 固件
|
WLKATA Mirobot 固件
|
WLKATA Mirobot 固件
|