按一下這裡來編輯。
黑白方圓 從容自得
純黑陽極氧化鋁合金+純白細蝕紋外殼
磐石品質,溫潤手感
一體化機身,開箱即用,靈活部署
專為桌面設計,靈活穩定,小巧安全
.
簡單易用 自然優雅
簡潔的外觀下,融合多處人性化設計,讓你不假思索,即刻上手
【 新增功能 】
灰度雕刻 / 3D列印 /wifi列印 /多台聯動 /手持示教 /脫機運行 /支援G代碼
P.S. 即日起原廠出貨取消 [ 體感控制器 ]

|

|

|

|

|
書畫技法 精益求精 支持BMP、SVG、DXF等格式 點線面一應俱全 0.2mm重複定位精度 帶來精湛筆法 大功率激光雕刻 木料、皮革不在話下 |
全民創造,做未來的先行者
簡潔的外觀下,糅合多處人性化設計,讓你不假思索,即刻上手
|
豐富的擴充接口
13個擴充接口. 1個可編程按鍵 2MB脫機指令儲存空間. 無限發展可能 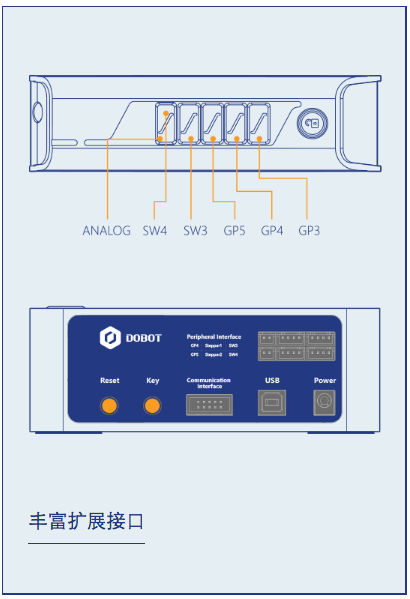
|
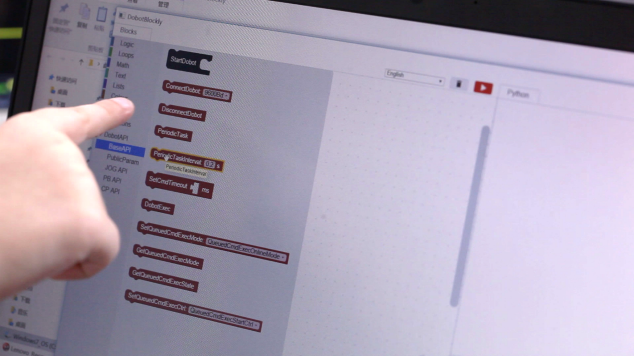
圖形化編程
Dobot Blockly 圖形化編程界面, 讓你用搭積木的方式編程。低學習門檻, 輕鬆開發。開發環境支持 Python, C++, C#, Java 等主流語言,內置大量預設模塊,讓你發揮不止一臂之力。 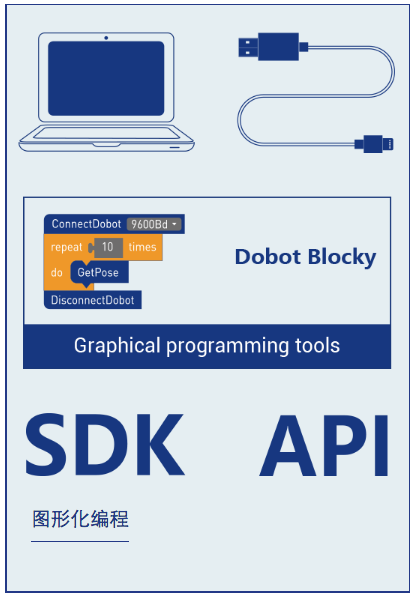
|
快速廉價部署
轻松使用、快速部署、 低成本维护…… 高性价比的投资, 助你一路成就! 
|
強大功能,盡無止境
你想像得到的,和想像不到的,都在這裡
未來的生活方式
一台機器,多樣拓展,低成本的全能解決方案
人機緊密協作,工作生活效率提升
科技以最有樂趣的方式影響教育
客廳、課堂、作坊、工廠……未來生活就在眼前
未來生活就在眼前
人機緊密協作,工作生活效率提升
科技以最有樂趣的方式影響教育
客廳、課堂、作坊、工廠……未來生活就在眼前
未來生活就在眼前






常見問題 Q&A
1、越疆魔術師Dobot 2.0機械手臂都有哪些末端夾具?
越疆魔術師Dobot2.0機械d手臂末端包含了諸如吸盤、夾筆器、激光頭、手爪、3D打印,更換末端夾具後可實現吸取物品、寫字畫畫、雷射雕刻&灰度雕刻、夾取物件、3D打印功能。
越疆魔術師Dobot2.0機械d手臂末端包含了諸如吸盤、夾筆器、激光頭、手爪、3D打印,更換末端夾具後可實現吸取物品、寫字畫畫、雷射雕刻&灰度雕刻、夾取物件、3D打印功能。
2、越疆魔術師Dobot 2.0機械手臂有哪些套件?具體套件是什麼?
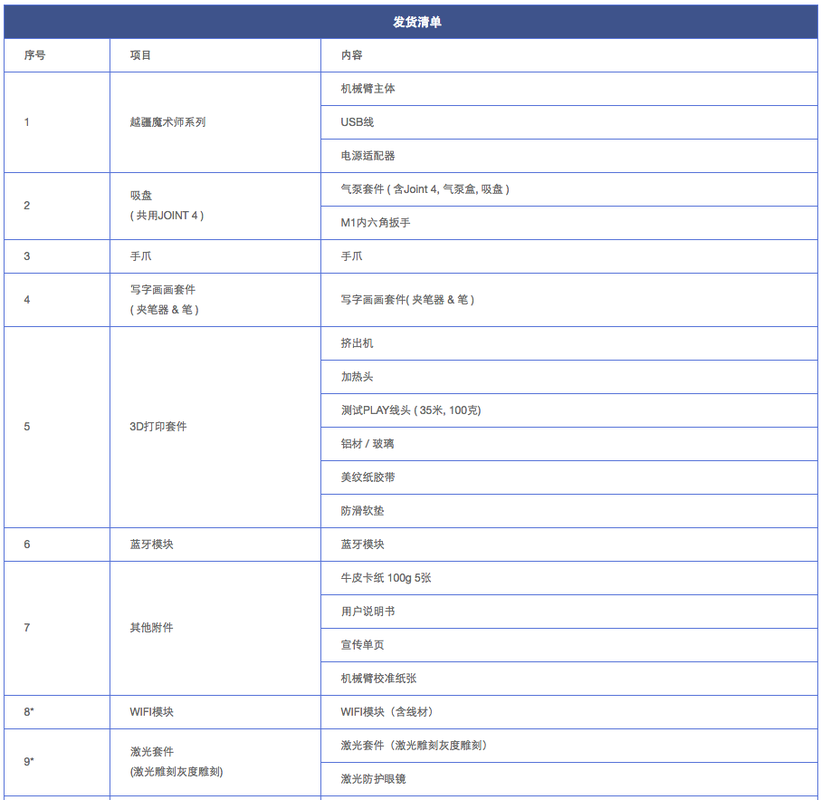
基礎版本:套件有機械手臂本體、吸盤、手爪、寫字畫畫、3D列印以及藍牙模塊。
教育版本:在基礎版的基礎之上增加了雷射套件(激光雕刻以及灰度雕刻)、WIFI 模塊、手柄控制套件以及LEAP MOTION套件。
基礎版本:套件有機械手臂本體、吸盤、手爪、寫字畫畫、3D列印以及藍牙模塊。
教育版本:在基礎版的基礎之上增加了雷射套件(激光雕刻以及灰度雕刻)、WIFI 模塊、手柄控制套件以及LEAP MOTION套件。
3、什麼是Teach & Playback?
Teach & Playback是教會Dobot機械手臂,並將其複現的功能,Teach是將機械臂的當前的XYZ坐標軸記錄下來,並形成點到點的順序。 Playback表示用戶可用來自定義動作,並按照規定次數重複。
Teach & Playback是教會Dobot機械手臂,並將其複現的功能,Teach是將機械臂的當前的XYZ坐標軸記錄下來,並形成點到點的順序。 Playback表示用戶可用來自定義動作,並按照規定次數重複。
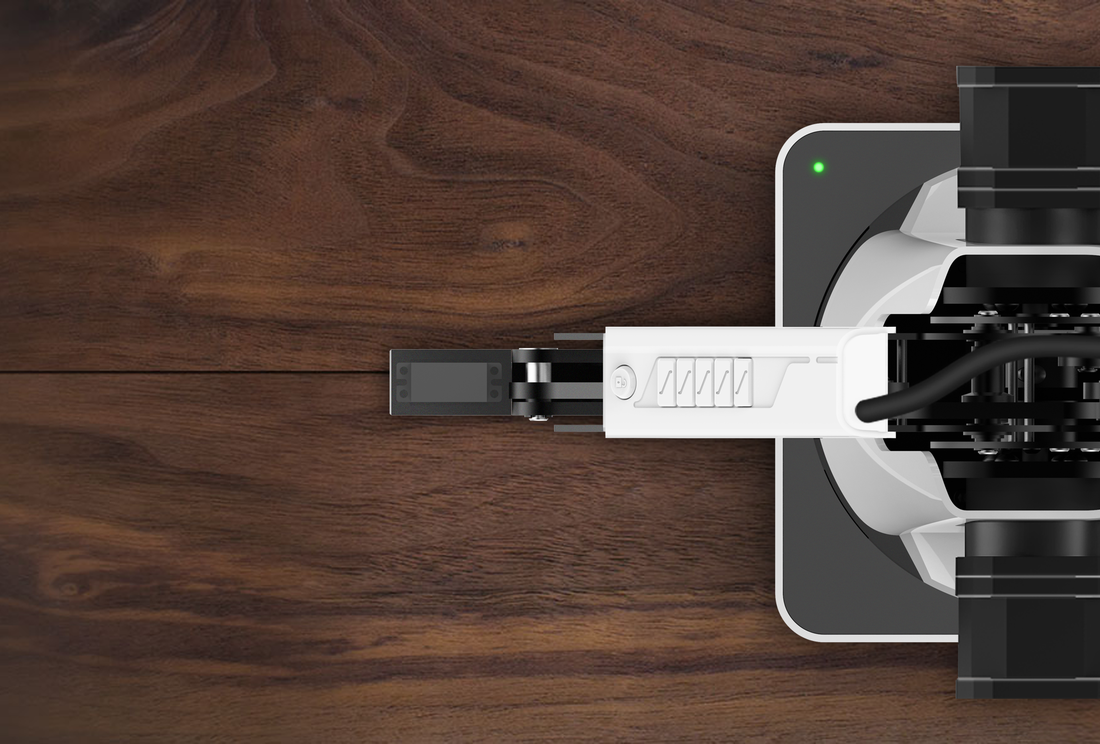
4、Dobot 2.0機械手臂寫字畫畫有什麼亮點展示?
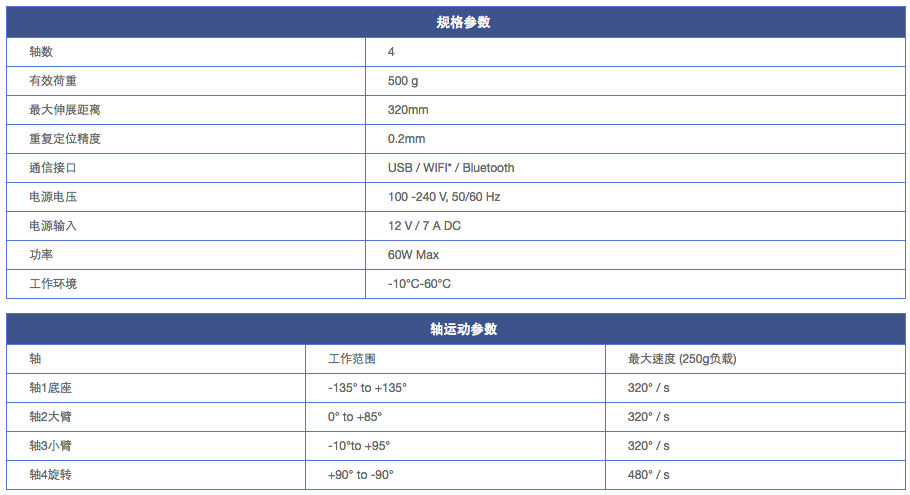
目前的寫字畫畫功能可以使用中性筆、毛筆、水彩筆等各種類型,同時支持PLT、BMP、SVG、DXF等格式,用戶可以自己製作圖案,點線面一應俱全,±0.2mm重複定位精度。
目前的寫字畫畫功能可以使用中性筆、毛筆、水彩筆等各種類型,同時支持PLT、BMP、SVG、DXF等格式,用戶可以自己製作圖案,點線面一應俱全,±0.2mm重複定位精度。
5、什麼是手持示教?
在Dobot 機械手臂運動範圍之內,手持移動末端到指定的位置,機械臂將會記錄下相應的路徑軌跡,然後按照指定的軌跡進行移動。
在Dobot 機械手臂運動範圍之內,手持移動末端到指定的位置,機械臂將會記錄下相應的路徑軌跡,然後按照指定的軌跡進行移動。
6、什麼是雷射雕刻?可以雕刻哪些材質?
雷射雕刻功能是利用Dobot機械手臂的高精度,配合最新選配的405nm 500mW藍紫光激光管,輸出功率更大,雕刻範圍更廣,可以用機械手臂在皮革、牛皮卡紙、木頭上雕刻個性圖案。最新的激光套件還支持通過脈寬調製(PWM)可以控制激光輸出功率,進行灰度雕刻。
雷射雕刻功能是利用Dobot機械手臂的高精度,配合最新選配的405nm 500mW藍紫光激光管,輸出功率更大,雕刻範圍更廣,可以用機械手臂在皮革、牛皮卡紙、木頭上雕刻個性圖案。最新的激光套件還支持通過脈寬調製(PWM)可以控制激光輸出功率,進行灰度雕刻。
7、什麼是灰度雕刻?
越疆魔術師機械手臂(Dobot Magician)機械手臂所帶的的雷射雕刻功能除了可以雕刻線條,還可以雕刻出帶灰度變化的圖案,比如將一幅黑白帶有灰度變化的圖片雕刻在木板上。
越疆魔術師機械手臂(Dobot Magician)機械手臂所帶的的雷射雕刻功能除了可以雕刻線條,還可以雕刻出帶灰度變化的圖案,比如將一幅黑白帶有灰度變化的圖片雕刻在木板上。

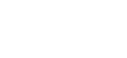
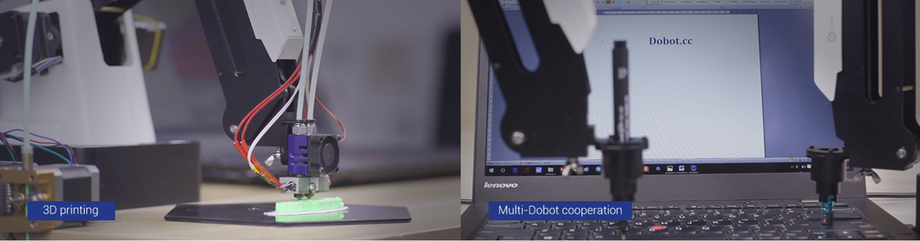
8、什麼是3D列印?所使用的軟件是什麼?支援什麼格式?越疆魔術師Dobot 2.0機械手臂 3D列印支持什麼材料?
3D列印,即快速成型技術的一種,它是一種以數字模型文件為基礎,運用粉末狀金屬或塑料等可粘合材料,通過逐層列印的方式來構造物體的技術。 3D列印使用的控制軟件是免費開源的Repetier host.可以在官網下載最新版本:https://www.repetier.com/
3D打印使用的是通用的STL文件格式,用戶可以自己設計三維模型並轉換為STL文件即可,或者在網絡搜索免費的模型文件直接導入。越疆魔術師Dobot 2.0機械手臂支持PLA材料的3D列印,打印精度為0.1mm。3D列印耗材 QTS品測科技均有販售.
3D列印,即快速成型技術的一種,它是一種以數字模型文件為基礎,運用粉末狀金屬或塑料等可粘合材料,通過逐層列印的方式來構造物體的技術。 3D列印使用的控制軟件是免費開源的Repetier host.可以在官網下載最新版本:https://www.repetier.com/
3D打印使用的是通用的STL文件格式,用戶可以自己設計三維模型並轉換為STL文件即可,或者在網絡搜索免費的模型文件直接導入。越疆魔術師Dobot 2.0機械手臂支持PLA材料的3D列印,打印精度為0.1mm。3D列印耗材 QTS品測科技均有販售.
9、越疆魔術師Dobot 2.0 機械手臂在3D打印上有什麼亮點?
越疆魔術師Dobot 2.0機械手臂是一台基於機械手臂擴展的3D列印,在滿足機械手臂3D列印功能的使用基礎上, 不僅保留了Dobot機械手臂功能的完整性,還大大的拓展了其他應用,如雷射雕刻,寫字畫畫等。由於機械手臂擴展3D列印,不受結構限制,還能使用雙色列印套件,擴展雙色列印的功能。
越疆魔術師Dobot 2.0機械手臂是一台基於機械手臂擴展的3D列印,在滿足機械手臂3D列印功能的使用基礎上, 不僅保留了Dobot機械手臂功能的完整性,還大大的拓展了其他應用,如雷射雕刻,寫字畫畫等。由於機械手臂擴展3D列印,不受結構限制,還能使用雙色列印套件,擴展雙色列印的功能。
10、什麼是圖形化編程?越疆魔術師Dobot 2.0 機械手臂採用的是什麼形式的圖形化平台?
圖形化編程是利用由圖形化組成的程序代碼, 用戶自由組合成為一整套執行程序, 然後交由Dobot機械手臂完成複雜動作的系統, 相較於傳統編程學習,具有簡單易學, 容易理解, 快速上手等優勢。 Dobot Blockly是越疆科技為該機械手臂開發的一套圖形化編程平台, 基於谷歌的開源平台Google Blockly。通過該平台,用戶可以通過用拼圖的方式進行編程, 直觀易懂。該平台還整合了Dobot機械手臂專屬的API, 以供用戶隨時調用。
圖形化編程是利用由圖形化組成的程序代碼, 用戶自由組合成為一整套執行程序, 然後交由Dobot機械手臂完成複雜動作的系統, 相較於傳統編程學習,具有簡單易學, 容易理解, 快速上手等優勢。 Dobot Blockly是越疆科技為該機械手臂開發的一套圖形化編程平台, 基於谷歌的開源平台Google Blockly。通過該平台,用戶可以通過用拼圖的方式進行編程, 直觀易懂。該平台還整合了Dobot機械手臂專屬的API, 以供用戶隨時調用。
11、在Dobot 機械手臂控制器上有哪些升級?有哪些接口?如何使用?
最新的Dobot控制器升級了最新的ARM控制器,大大增強了微控制器的處理能力。您可通過串口通信來接入新的傳感器、控制器等。拓展接口豐富,Dobot機器人魔術師系列的機身上共有13個擴展接口,用戶可以接上各種外置模塊,通過編程為機械臂實現更高級的功能。
最新的Dobot控制器升級了最新的ARM控制器,大大增強了微控制器的處理能力。您可通過串口通信來接入新的傳感器、控制器等。拓展接口豐富,Dobot機器人魔術師系列的機身上共有13個擴展接口,用戶可以接上各種外置模塊,通過編程為機械臂實現更高級的功能。
12、 什麼是二次開發?
二次開發是利用Dobot機械手臂作為平台,通過如Python、Java、C++等開發語言通過提供的SDK,調用應用程序接口(API)來編程控制Dobot機械手臂完成你想要的做的應用。若您使用的開發語言不在SDK支持的範圍內, 或想要擴展到其他平台如手機端、PLC等其他控制系統來控制機械手臂, 您可以通過提供的底層通信協議直接實現與Dobot機械手臂的通信,實現對Dobot機械手臂底層的控制, 完成高級定制化應用功能的開發。
二次開發是利用Dobot機械手臂作為平台,通過如Python、Java、C++等開發語言通過提供的SDK,調用應用程序接口(API)來編程控制Dobot機械手臂完成你想要的做的應用。若您使用的開發語言不在SDK支持的範圍內, 或想要擴展到其他平台如手機端、PLC等其他控制系統來控制機械手臂, 您可以通過提供的底層通信協議直接實現與Dobot機械手臂的通信,實現對Dobot機械手臂底層的控制, 完成高級定制化應用功能的開發。
13、什麼是多機控制?
您可以通過WIFI或USB使用電腦同時連接多個Dobot機械手臂進行控制。
您可以通過WIFI或USB使用電腦同時連接多個Dobot機械手臂進行控制。
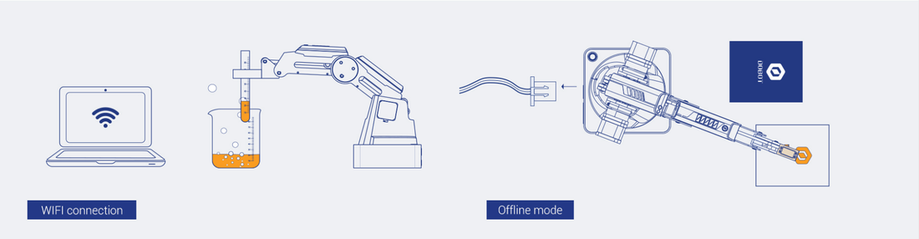
14、什麼是脫機模式?
Dobot的魔術師系列機械手臂具有內置儲存空間,用戶可以把存點列表或代碼上傳,然後讓機械臂脫機執行,脫離PC端自主執行程序。
Dobot的魔術師系列機械手臂具有內置儲存空間,用戶可以把存點列表或代碼上傳,然後讓機械臂脫機執行,脫離PC端自主執行程序。
進階問題 Q&A
Q1:是否可以使用BT進行對DOBOT的動作腳本控制?BT-->bluetooth PC<--BT-->DOBOT ANS:二次開發 客戶通過自己的藍牙模組連接dobot的藍牙 然後將數據根據通信協議 通過藍牙發送給機械臂即可
Q2:一台電腦連接4台手臂的問題,若開了四個軟件視窗連接4台DOBOT2.0後,同時啟動做同步,還是各機器本身可以同步?
ANS:同時啟動,不能實現同步;或者客戶本身的軟體可以同時連接四臺機器,然後同時向四臺機器發送數據 應該可以實現同步
Q3:PC傳送腳本給DOBOT那個,就是客戶一樣用USB連接, 但由他們自己寫得Windows軟體來傳送腳本,不透過DobotStudio
ANS:客戶自己的軟件可以實現,就是開發自己的上位機,然後根據API 或者通信協議發送數據給機械臂即可。
Q4:I/O port是否可接馬達(PWM控制)?且由Dobot 軟體介面控制?
ANS:主控板後面的兩個步進電機接口,可以通過blockly或者script控制開啟和關閉;如果是和joint4一樣的舵機, EIO里面任意一個可以PWM輸出的IO引腳都可以控制,但是除了GP3接口 其他的無法用軟體界面控制
Q5:是否有Dobot USB 軟體傳輸規格?我們需要由PC 直接傳送腳本給Dobot?
ANS:腳本目前不可以直接燒錄進機器里面;需要通過USB 連接才能執行
Q6:吸盤那顆馬達的規格?
ANS:吸盤舵機規格沒有具體的,但是PWM 可以輸出10HZ-100HZ,可以根據實際舵機進行設置即可
Q7:客戶想實現單個機械臂畫國畫的功能是否可行?
ANS:單個和雙個的原理是一樣的 通過存點示教的方式記錄軌跡 然後再脫機執行
Q8:機械手臂歸零完成之後,有蜂鳴器長鳴一聲表示完成。軟體通信方面有沒有信號反饋?Api裡面有沒有?
ANS:有的,歸零是隊列指令,然後使用與PTP一樣的查詢命令就可以了
Q9:為何我外部未連線,條件是EIO1-input=1,手臂它也會動作呢?
ANS:軟體是逐行掃描的,且該行直到滿足觸發條件才運行
Q10:關於寫字的功能,單線條的字這個怎麽實現的呢
ANS:單線條字體客戶自己可以制作PLT or SVG文件或是可以參考一代機械臂的制作方法 http://cn.dobot.cc/tutorial/how-to-make-plt-file/27/26.html
Q11:SetQueuedCmdStartExec(void)函數的作用,是否相當於按一下機械臂的Key按鍵?(Dobot Magician)
ANS:和stopexec相對應,啟動/停止機械臂執行指令
Q12:在控制介面有沒有可能做到例如 t=0 時 我的角度在30度,然後t=1 角度=40,t=2 角度=50.....依此類推
ANS:角度控制沒法存點,只能是XYZ坐標系統
Q13:手臂能給予物件的最大壓力提出疑問,它能施加多少壓力呢?
ANS:手臂用力大點的話就會導致丟步,建議200g以下的施力,跟人手敲鍵盤,滑手機的程度差不多
Q14:我想從PLC板子那外掛一顆藍芽模組,跟DOBOT裡的藍芽模組做配對連接,好讓我做想要的操控方式,可否提供藍芽模組配置規格型號,頻率,傳輸速率的資料呢?
ANS:不需要這些信息,關鍵在於我們的藍芽模組是BLE的Server,那麽您要買的藍芽模組必須是BLE的Client,搜到我們的藍芽4.0的模組就行 藍芽版本4.0~4.2之間,支持主從模式的就可以
Q2:一台電腦連接4台手臂的問題,若開了四個軟件視窗連接4台DOBOT2.0後,同時啟動做同步,還是各機器本身可以同步?
ANS:同時啟動,不能實現同步;或者客戶本身的軟體可以同時連接四臺機器,然後同時向四臺機器發送數據 應該可以實現同步
Q3:PC傳送腳本給DOBOT那個,就是客戶一樣用USB連接, 但由他們自己寫得Windows軟體來傳送腳本,不透過DobotStudio
ANS:客戶自己的軟件可以實現,就是開發自己的上位機,然後根據API 或者通信協議發送數據給機械臂即可。
Q4:I/O port是否可接馬達(PWM控制)?且由Dobot 軟體介面控制?
ANS:主控板後面的兩個步進電機接口,可以通過blockly或者script控制開啟和關閉;如果是和joint4一樣的舵機, EIO里面任意一個可以PWM輸出的IO引腳都可以控制,但是除了GP3接口 其他的無法用軟體界面控制
Q5:是否有Dobot USB 軟體傳輸規格?我們需要由PC 直接傳送腳本給Dobot?
ANS:腳本目前不可以直接燒錄進機器里面;需要通過USB 連接才能執行
Q6:吸盤那顆馬達的規格?
ANS:吸盤舵機規格沒有具體的,但是PWM 可以輸出10HZ-100HZ,可以根據實際舵機進行設置即可
Q7:客戶想實現單個機械臂畫國畫的功能是否可行?
ANS:單個和雙個的原理是一樣的 通過存點示教的方式記錄軌跡 然後再脫機執行
Q8:機械手臂歸零完成之後,有蜂鳴器長鳴一聲表示完成。軟體通信方面有沒有信號反饋?Api裡面有沒有?
ANS:有的,歸零是隊列指令,然後使用與PTP一樣的查詢命令就可以了
Q9:為何我外部未連線,條件是EIO1-input=1,手臂它也會動作呢?
ANS:軟體是逐行掃描的,且該行直到滿足觸發條件才運行
Q10:關於寫字的功能,單線條的字這個怎麽實現的呢
ANS:單線條字體客戶自己可以制作PLT or SVG文件或是可以參考一代機械臂的制作方法 http://cn.dobot.cc/tutorial/how-to-make-plt-file/27/26.html
Q11:SetQueuedCmdStartExec(void)函數的作用,是否相當於按一下機械臂的Key按鍵?(Dobot Magician)
ANS:和stopexec相對應,啟動/停止機械臂執行指令
Q12:在控制介面有沒有可能做到例如 t=0 時 我的角度在30度,然後t=1 角度=40,t=2 角度=50.....依此類推
ANS:角度控制沒法存點,只能是XYZ坐標系統
Q13:手臂能給予物件的最大壓力提出疑問,它能施加多少壓力呢?
ANS:手臂用力大點的話就會導致丟步,建議200g以下的施力,跟人手敲鍵盤,滑手機的程度差不多
Q14:我想從PLC板子那外掛一顆藍芽模組,跟DOBOT裡的藍芽模組做配對連接,好讓我做想要的操控方式,可否提供藍芽模組配置規格型號,頻率,傳輸速率的資料呢?
ANS:不需要這些信息,關鍵在於我們的藍芽模組是BLE的Server,那麽您要買的藍芽模組必須是BLE的Client,搜到我們的藍芽4.0的模組就行 藍芽版本4.0~4.2之間,支持主從模式的就可以