輕鬆組裝變換 KXR 機器人
日本近藤科學KXR 系列機器人套件。是一套可以組裝多種形態機器人之套件,
如: 六腳型、恐龍型、人類型、龜型...等規格。
一套 KXR 已包含各種機器人所需之零件,您可以輕易的變化組裝並還原。
KXR二代版本比一代版本增加了更多組裝範例,重組範圍及擴充性也大幅提升。
如: 六腳型、恐龍型、人類型、龜型...等規格。
一套 KXR 已包含各種機器人所需之零件,您可以輕易的變化組裝並還原。
KXR二代版本比一代版本增加了更多組裝範例,重組範圍及擴充性也大幅提升。
KXR 影片介紹

KXR Advance Set A Ver.2
代碼:03158 這個套件中,可以組裝一個6腿型和一個恐龍類型的機器人,一個具有人型類型抓手的規格。另外,由於KXR系列的所有部件都是完整的,可以自行重組並完成原來的機器人。Ver.2 升級版本提供了伺服馬達的穩定度以及重組自由度。 
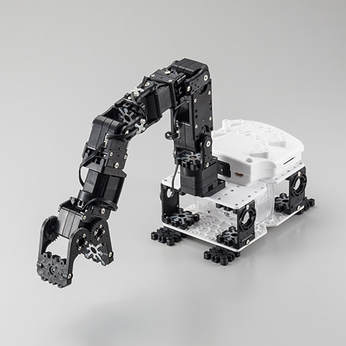
KXR-A5 手臂型 Ver.2 代碼:03157
KXR-A5 可以使用包括手在內的五個伺服馬達構建一個手臂機器人。根據零件和伺服馬達的改編以及補充能自由地增加可動的車軸。 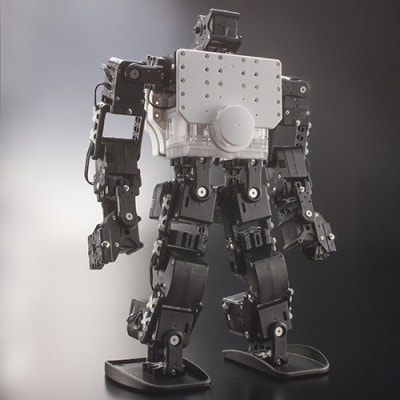
KXR-L2 類人形機器人
代碼:03130 KXR-L2類人型機器人,採用KRS-3301全組搭配16個伺服馬達。可以執行強健的兩足動作行走和豐富多彩的動作。 |

KXR Advance Set B
代碼:03142 這是一個很棒的設定,將伺服馬達改為KRS-3301,同時保有Advance Set A零件內容,用更豐富的零件組裝各種機器人。 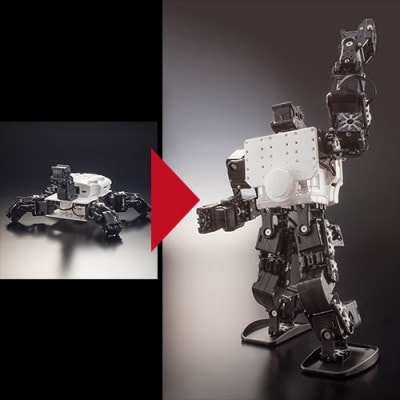
KXR轉換套件(L4T→L2)
代碼:03132 KXR-L4T-R是被設定為從烏龜型到KXR-L2 類人型的重新組合。由於只設置了必要的部件,因此可以輕鬆進行重新組合。 
KXR-L4T-R龜類型(學術包)
代碼:03156 這是一套四足步行龜型機器人。您可以利用輪子來替代腳部來轉換成自走車型態。 Arduino屏蔽,安裝部件,PSD傳感器為學術包新增內容。 |
KXR 進階套件A Ver.2 包裝清單

・強化的塑料零件
・控制板RCB-4mini
・伺服馬達 ·KRS-3302 ICS*12
KRS-3304R2 ICS×6
・ROBO 鎳氫電池E型 6N-800mAh Ni-MH
・充電器BX-32MH
・雙USB適配器HS
・電纜,螺絲
<作業環境需求>
・支持的OS / Windows Vista(建議使用SP1)
Windows 7 8 8.1 10
・USB接頭(1.1 / 2.0)
※它符合使用.NET的系統要求。
日本製造
・控制板RCB-4mini
・伺服馬達 ·KRS-3302 ICS*12
KRS-3304R2 ICS×6
・ROBO 鎳氫電池E型 6N-800mAh Ni-MH
・充電器BX-32MH
・雙USB適配器HS
・電纜,螺絲
<作業環境需求>
・支持的OS / Windows Vista(建議使用SP1)
Windows 7 8 8.1 10
・USB接頭(1.1 / 2.0)
※它符合使用.NET的系統要求。
日本製造
|

|

|

|
|

|

|
■多種組合隨意改造
基於KXR套件,可以輕鬆地將零件組合成符合套件需求的機器人。
■強化部分材料
手臂和關節部件採用玻璃纖維增強樹脂,確保強度耐用且足以承受強勁操作。
■ 更容易組裝
通過組合零件確保了可擴展性,組裝的方便性得到了改善。如果按照程序進行組裝,則可以附上詳細的裝配說明,以便構建一個完整的機器人。
■ 可擴充背包
除了成為機器人大腦的控制板之外,安裝在裝置背面的背包還可以配備陀螺儀傳感器,加速度傳感器,無線控制器接收器。
※傳感器,無線控制器另售。
■ 套件內容可以做些什麼
這套設備只是機器人本身的簡單配置。使用附帶的USB適配器,通過PC與PC進行連接。使用安裝在PC上的專用軟件HeartToHeart 4,您可以完成從機器人維護到創建,註冊和播放動作的所有任務。
■包含特殊的動作創建軟件
MotionTo創建軟件HeartToHeart 4附加到集合上。通過使用該軟件,您可以輕鬆地使用滑鼠創建動作而無需使用編程語言。此外,通過使用“示教功能”,可以通過軟件讀取機器人拍攝的姿勢,因此可以更輕鬆地創建動作。
另外,機器人的維護和電池的電壓檢查也是可能的。
■包括大量的樣本運動
KXR-L6,L4D恐龍類型,帶有L2G抓手和每個套件的動作至今發布。基本行動,如步行,只需通過組裝後註冊即可輕鬆操作。
KXR 各型機器人組裝教學與範例

KXR - L2G人形機器人手冊·範例Ver.2.0
發表於2018.04.18
機器人名稱:KXR-L2G人形機器人(帶抓手)Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
* 通過安裝陀螺儀傳感器KRG-4,可以實現更穩定的行走。特別是在創建僅使用KRS-3302的機器人時,請安裝陀螺儀。
KXR-L2G是一種規格,手柄安裝在KXR-L2的手上。由於伺服器內置於夾具中,因此可以打開和關閉。
在高級套件A中,高扭矩KRS-3304 R2 ICS用於承載支腿。結果,可以從下方下載高速運動。
發表於2018.04.18
機器人名稱:KXR-L2G人形機器人(帶抓手)Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
* 通過安裝陀螺儀傳感器KRG-4,可以實現更穩定的行走。特別是在創建僅使用KRS-3302的機器人時,請安裝陀螺儀。
KXR-L2G是一種規格,手柄安裝在KXR-L2的手上。由於伺服器內置於夾具中,因此可以打開和關閉。
在高級套件A中,高扭矩KRS-3304 R2 ICS用於承載支腿。結果,可以從下方下載高速運動。
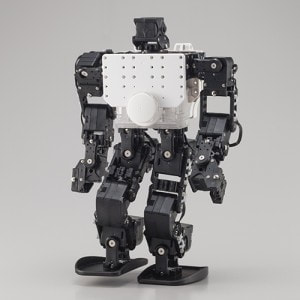
KXR-L2仿人型手冊·範例Ver.2.0
發表於2018.04.18
機器人名稱:KXR-L2 Humanoid Type Ver.2
規格:標準16軸(KRS-3302:16件)
KXR-L2是標準的雙足步行機器人。通過自由移動全身的16個伺服馬達,可以發揮高難度的動作。此外,在案例教程中,我們有各種前後行走,彎曲,俯臥,打擊..等動作,因此只要一完成組裝後即可馬上操控移動機器人。
發表於2018.04.18
機器人名稱:KXR-L2 Humanoid Type Ver.2
規格:標準16軸(KRS-3302:16件)
KXR-L2是標準的雙足步行機器人。通過自由移動全身的16個伺服馬達,可以發揮高難度的動作。此外,在案例教程中,我們有各種前後行走,彎曲,俯臥,打擊..等動作,因此只要一完成組裝後即可馬上操控移動機器人。

KXR-L6 6腳式手冊·範例Ver.2.0
發表於2018.04.18
機器人名稱:KXR-L6 6腿型Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
KXR-L6是一款六條腿的步行機器人。由於每個伺服器在每條腿上都有三個伺服馬達,您可以在單獨改變腿部高度並同時行走。
在先進的KXR advence A套件中,高扭矩KRS-3304R2 ICS 伺服馬達可用於承受高負載的腳步支撐。
發表於2018.04.18
機器人名稱:KXR-L6 6腿型Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
KXR-L6是一款六條腿的步行機器人。由於每個伺服器在每條腿上都有三個伺服馬達,您可以在單獨改變腿部高度並同時行走。
在先進的KXR advence A套件中,高扭矩KRS-3304R2 ICS 伺服馬達可用於承受高負載的腳步支撐。

KXR-L4D恐龍型手冊·範例Ver.2.0
發表於2018.04.18
機器人名稱:KXR-L 4 D恐龍型Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
KXR-L4D是一款有四條腿的恐龍機器人。在設定的內容中,由於頸部和嘴部的上下軸可被操作,因此可以咬取攜帶物品。
發表於2018.04.18
機器人名稱:KXR-L 4 D恐龍型Ver.2
規格:套件標準18軸
(KRS-3304R2:6件/ 3302:12件)(或KRS-3302:18)
KXR-L4D是一款有四條腿的恐龍機器人。在設定的內容中,由於頸部和嘴部的上下軸可被操作,因此可以咬取攜帶物品。
|
|
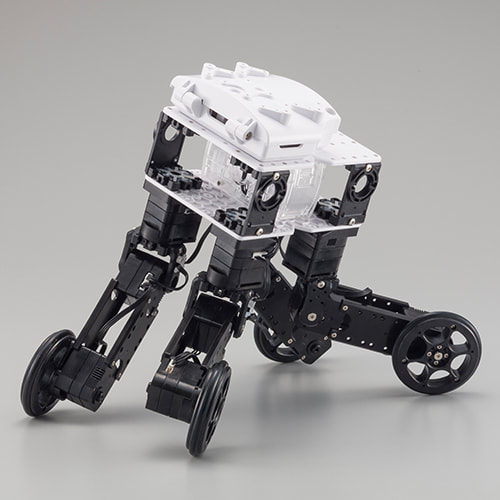
KXR-L4T/R龜型/四輪型·手冊範例Ver.2.0
2018.04.18發表 機器人名稱:KXR-L4T-R龜型·四輪型Ver.2 規格:標準套件 9軸(KRS-3302:9件) KXR-L4T龜型是一種四軸行走機器人,一隻腿有兩軸馬達。即使是初學者也能輕鬆操作,結構簡單。透過重新組裝,您可以將腳轉換為輪子並使其成為四輪自走車模式。 |
|
KXR-A5手臂式 手冊與範例Ver.2.0
發表於2018.04.18 機器人名稱:KXR-A5手臂式Ver.2 規格:標準套件 5軸(KRS-3302:5件) KXR-A5手臂型有五個伺服馬達,包括夾爪。由於虛擬伺服用於框架的一部分,您可以原樣更換KRS-3300系列的伺服並添加軸。雖然該套件是5軸,但可以通過更換最多7個軸進行擴展。另外,通過重新組合或添加部件和伺服馬達,可以更加自由的增加可動軸。 |

KXR-R4LL Rover LL型 手冊.範例 Ver.2.0
發表於2018.04.18
機器人名稱:KXR-R4LL Rover LL Type Ver.2
規格:標準套件 12軸(KRS-3302:12件)
KXR - R4LL Rover LL型LL代表長腿。字面上是一個長腿的長條,你可以線性地改變汽車高度,因為伺服馬達設計在關節中。通過使用它,可以輕鬆的移動在具有高低差的地方。
發表於2018.04.18
機器人名稱:KXR-R4LL Rover LL Type Ver.2
規格:標準套件 12軸(KRS-3302:12件)
KXR - R4LL Rover LL型LL代表長腿。字面上是一個長腿的長條,你可以線性地改變汽車高度,因為伺服馬達設計在關節中。通過使用它,可以輕鬆的移動在具有高低差的地方。

KXR-L4N長頸龍型 手冊·範本 Ver.2.0
發表於2018.06.28
機器人名稱:KXR-L 4 N 長頸龍型
規格:標準套件11軸(KRS-3302:11件)
KXR-L4N長頸龍型是一種將恐龍頭頸部與龜式機器人軀幹互相結合的機器人。由於伺服馬達也安裝在前端嘴部中,因此可以打開和關閉。你可以做一些很棒的工作,比如放下手臂並用前端抓住它。運動是基於龜類型,但我們已經改變一些地方用來平衡頸部增加的重量。請下載我們的範本並試著操作體驗看看。
發表於2018.06.28
機器人名稱:KXR-L 4 N 長頸龍型
規格:標準套件11軸(KRS-3302:11件)
KXR-L4N長頸龍型是一種將恐龍頭頸部與龜式機器人軀幹互相結合的機器人。由於伺服馬達也安裝在前端嘴部中,因此可以打開和關閉。你可以做一些很棒的工作,比如放下手臂並用前端抓住它。運動是基於龜類型,但我們已經改變一些地方用來平衡頸部增加的重量。請下載我們的範本並試著操作體驗看看。
■ 操作說明書 ( 日本語/English )
| kxr-l4n_長頸龍型_操作手冊_日本語_v_2_0.pdf |
■ 運動範例下載
| 長頸龍基本運動範本_kxr-l4nv1.0.zip |
推薦選購配件

ROBO鎳氫電池E型 用於機器人的鎳氫電池。這是KXR系列標準產品。KXR的尺寸僅適用於電池盒。 
KRG-4 B套裝(ZH⇔ZH包括)2件 它是檢測機器人姿勢並自動糾正行走的傳感器。推薦用於雙足步行機器人。 
KRC-5FH收發器組 手柄上的控制器可通過按鈕操作實現機器人的無線電控制。您可以播放分配給它的動作。比市售遊戲控制器更多的按鈕。 |
BX-31LF 鋰鐵專用充電器 這是針對2S的LiFe電池(鋰鐵電池)所開發的專用USB充電器。透過本體上的LED指示燈, 可以得知充電器的狀態。 
PSD傳感器B組(包括ZH⇔PH) 這是一種應用紅外線進行三角測量的方法,它以高精度和高速度檢測到物體的距離。 
KRS-3302 ICS 採用立方體型設計的小型伺服器。雖然採用樹脂齒輪和粗糙電機,但價格便宜,但操作平穩,扭矩適中。 最大扭矩:6.7kg・cm 最高速度:0.16s/60° 
|

交流適配器(6 V 2 A) 它是對KXR使用6至7.4 V伺服機器人的最佳AC適配器。 附LV轉換DC插孔×1 。 
RAS-3 B套裝(含ZH⇔ZH) 用於檢測機器人的姿態,當機器人跌倒時,可以檢測是躺在背部還是躺下,並且可以自動判斷向上的動作。 
ROBO電池F2-850型(Li -fe) 機器人用鋰鐵氧體電池。 2個電池/ 6.6V / 850mAh。包括XH平衡充電終端。 |
BX-32MH鎳氫專用充電器 鎳氫電池(Ni-MH)它是6個電池(7.2 V)的專用充電器。只需連接電池的電源端子即可輕鬆充電。 
KXR安裝套件選件板A 這是一套鈑金,螺絲和電纜,用於安裝KXR系列背包中的Arudino UNO。如果您有Arduino UNO,您可以立即開始開發。 
KRS-3304R2 ICS 採用立方體型設計的小型伺服器。該齒輪採用金屬齒輪,以確保與雙足步行機器人一起使用時的耐用性 最大扭矩:13.9kgf・cm 最高速度:0.11s/60° 
|