Dobot機械手臂 快速開始
第一步 :
下載Dobot軟件及Ardunio程式並安裝
1、安裝Arduino驅動 dobot.cc/download 或者 www.arduino.cc
2、下載軟體:DOBOT軟件dobot.cc/download
DobotTools:基礎版,包括示教再現,寫字,畫畫,激光雕刻,鼠標控制功能。 点击下载
DobotApplication:專業版在基礎版上增加了體感控制,EEG控制功能。 点击下载
下載Dobot軟件及Ardunio程式並安裝
1、安裝Arduino驅動 dobot.cc/download 或者 www.arduino.cc
2、下載軟體:DOBOT軟件dobot.cc/download
DobotTools:基礎版,包括示教再現,寫字,畫畫,激光雕刻,鼠標控制功能。 点击下载
DobotApplication:專業版在基礎版上增加了體感控制,EEG控制功能。 点击下载

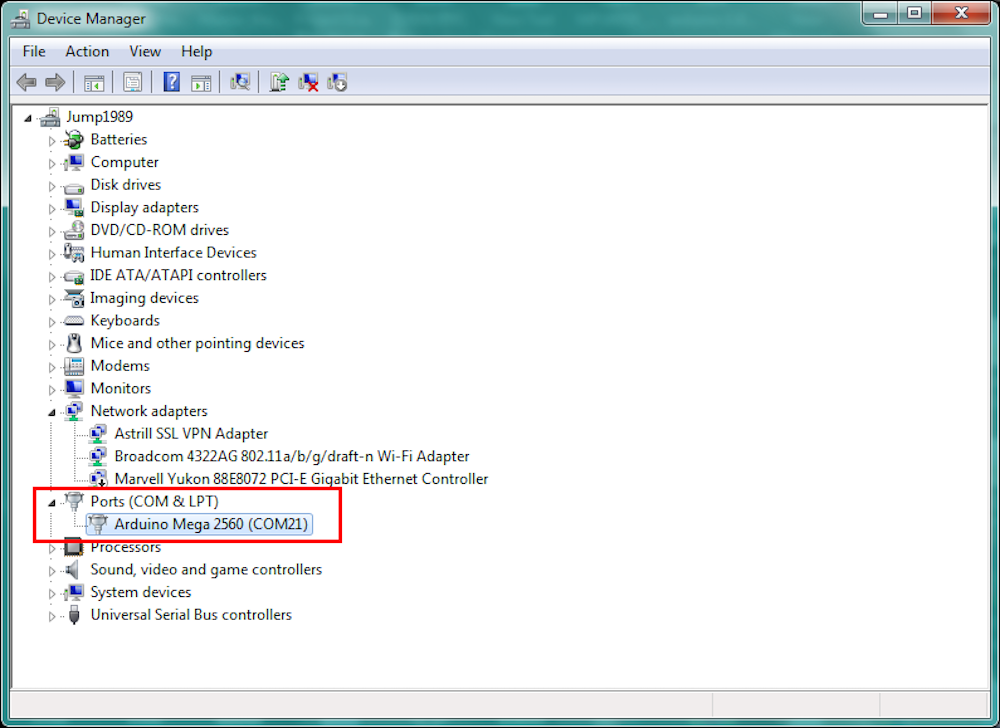
在設備管理器中,檢查Arduino是否正確安裝:
第二步 :
連線
1、按照黑色線上面的標識Stepper_L, Stepper_R, Stepper_rot連接步進電機線
(注:此處Stepper_L, Stepper_R是以面對機械臂正前方為準);
2、安裝角度傳感器:
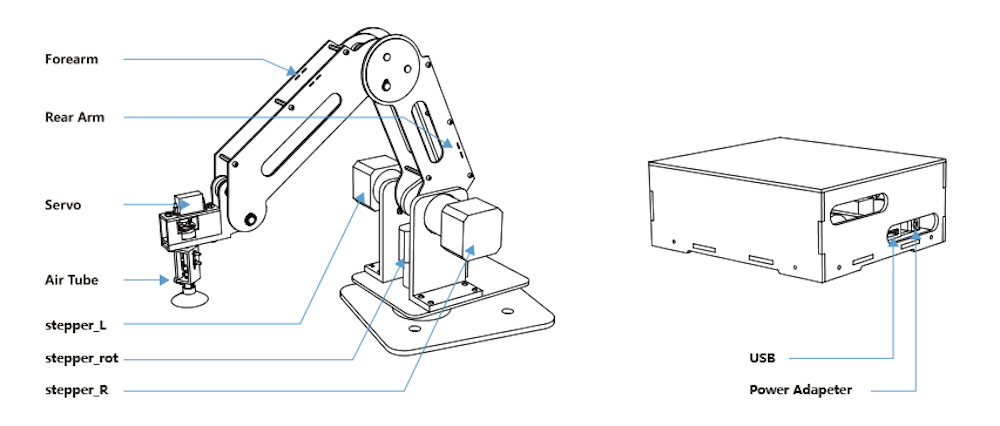
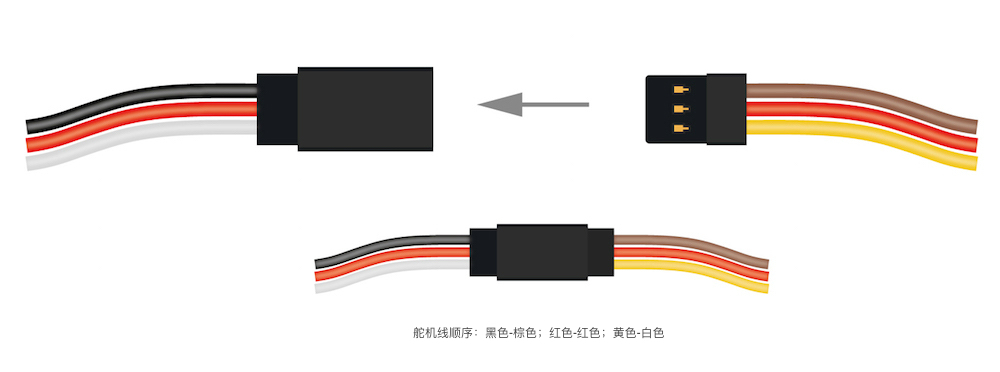
3、連接舵機 使用舵機延長線(黑白紅)將舵機連接起來
4、連接氣管和吸盤
5、連接電源線以及USB線
傳感器正確安裝示意圖:

第三步 :
開啟Dobot
1、按照下圖把Dobot擺放到推薦的初始狀態;
2、打開電源;
3、點擊復位(Reset)按鈕。
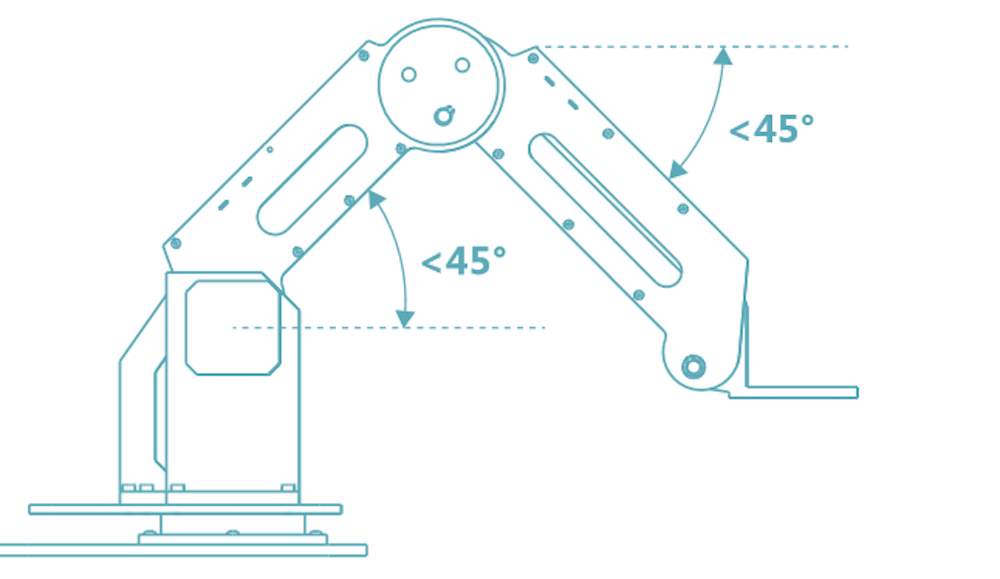
* 推薦起始位置:
(1) 當Dobot通電後,機械臂位置將會鎖死,此時請勿移動機械臂。
(2)當機械臂與水平面夾角小於45°時,角度傳感器測量的數據更準確,更有利於發揮Dobot機械臂性能。
* 關於重置:通電後,Dobot需要撥動復位按鈕來獲取當前的角度讀數。
第四步:
使用軟件操作機械手臂
軟件主界面操作說明:
軟件主界面操作說明:
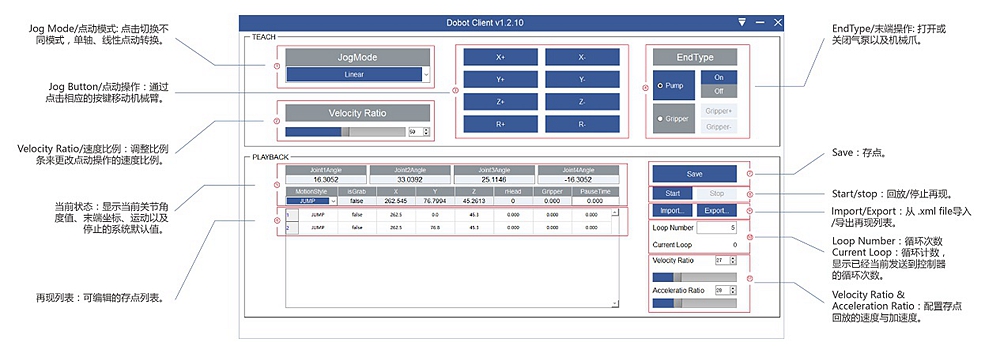
1、 Jog Mode/點動模式: 點擊切換不同模式,單軸、線性點動轉換
2 、Jog Button/點動操作:通過點擊相應的按鍵移動機械臂
3 、Velocity Ratio/速度比例:調整比例條來更改點動操作的速度比例
4 、EndType/末端操作: 打開或關閉氣泵以及機械爪
5 、當前狀態:顯示當前關節角度值、末端坐標、運動以及停止的系統默認值
6 、再現列表:可編輯的存點列表
7 、Save:存點
8 、Start/stop:回放/停止再現
9 、Import/Export:從 .xml file導入/導出再現列表
10 、Loop Number:循環次數;Current Loop:循環計數,顯示已經當前發送到控制器的循環次數
11 、Velocity Ratio & Acceleration Ratio:配置存點回放的速度與加速度
* 點擊左上方三角符號可切換語言
1、 Jog Mode/點動模式: 點擊切換不同模式,單軸、線性點動轉換
2 、Jog Button/點動操作:通過點擊相應的按鍵移動機械臂
3 、Velocity Ratio/速度比例:調整比例條來更改點動操作的速度比例
4 、EndType/末端操作: 打開或關閉氣泵以及機械爪
5 、當前狀態:顯示當前關節角度值、末端坐標、運動以及停止的系統默認值
6 、再現列表:可編輯的存點列表
7 、Save:存點
8 、Start/stop:回放/停止再現
9 、Import/Export:從 .xml file導入/導出再現列表
10 、Loop Number:循環次數;Current Loop:循環計數,顯示已經當前發送到控制器的循環次數
11 、Velocity Ratio & Acceleration Ratio:配置存點回放的速度與加速度
* 點擊左上方三角符號可切換語言
第五步:
讓機械臂動起來吧
1、點擊1區域將JogMode切換至liner模式;
2、你可以將一個小物體(如手機)放在機械臂附近, 通過點擊2區域操作機械臂移動到小物體上方,點擊4、打開氣泵,此時小物體會被機械臂吸起來;
3、點擊Save存一個點;
4、點擊2區域,先點擊Z+升高手機,移動機械臂到另外一處,將小物體放置在桌面上,點擊4關閉氣泵;
5、點擊Save再存一個點;
6、點擊Z+,將手機放回原處;
7、點擊start,機械臂將完成將小物體從當前位置移動到另一位置的任務。