|
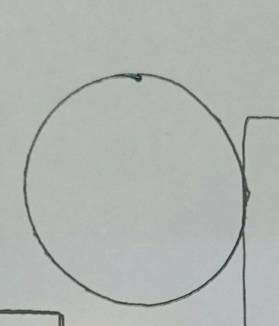
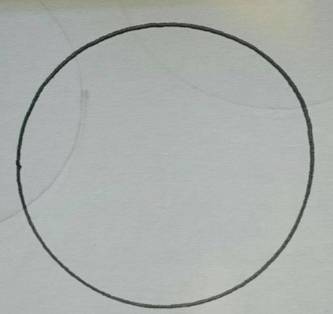
這次小編講講在跟客戶Demo Dobot2.0繪圖軌跡的遇到的小事件,客戶的要求很簡單,能畫出圓型軌跡就好,因為在空中畫圓有些抽像,所以就改成用筆在紙上畫圓,沒想到畫出來的圓形居然不圓啊!一度以為機器是出了啥問題,後來測試了寫字畫畫功能確又正常的,怎畫個簡單圖案就會NG呢?後來猜測是速度及加速度上是否需要調整,嗯把這些參數從100>50>20慢慢遞減,果然證明推測無誤,放慢會畫的比較漂亮,欲速則不達啊!所以在畫幾何圖形時要特別注意速度問題以免發生失步情形喔!
0 評論
DOBOT 2.0機械手臂截至目前約發表了三個月左右,小編在這邊整理一些客戶常常會問到的進階問題如下,敬請參閱。未來若有新增其他進階問題將會陸續整理到此討論區中,感謝囉.....
Q1:是否可以使用BT進行對DOBOT的動作腳本控制?BT-->bluetooth PC<--BT-->DOBOT ANS:二次開發 客戶通過自己的藍牙模組連接dobot的藍牙 然後將數據根據通信協議 通過藍牙發送給機械臂即可 Q2:一台電腦連接4台手臂的問題,若開了四個軟件視窗連接4台DOBOT2.0後,同時啟動做同步,還是各機器本身可以同步? ANS:同時啟動,不能實現同步;或者客戶本身的軟體可以同時連接四臺機器,然後同時向四臺機器發送數據 應該可以實現同步 Q3:PC傳送腳本給DOBOT那個,就是客戶一樣用USB連接, 但由他們自己寫得Windows軟體來傳送腳本,不透過DobotStudio ANS:客戶自己的軟件可以實現,就是開發自己的上位機,然後根據API 或者通信協議發送數據給機械臂即可。 Q4:I/O port是否可接馬達(PWM控制)?且由Dobot 軟體介面控制? ANS:主控板後面的兩個步進電機接口,可以通過blockly或者script控制開啟和關閉;如果是和joint4一樣的舵機, EIO里面任意一個可以PWM輸出的IO引腳都可以控制,但是除了GP3接口 其他的無法用軟體界面控制 Q5:是否有Dobot USB 軟體傳輸規格?我們需要由PC 直接傳送腳本給Dobot? ANS:腳本目前不可以直接燒錄進機器里面;需要通過USB 連接才能執行 Q6:吸盤那顆馬達的規格? ANS:吸盤舵機規格沒有具體的,但是PWM 可以輸出10HZ-100HZ,可以根據實際舵機進行設置即可 Q7:客戶想實現單個機械臂畫國畫的功能是否可行? ANS:單個和雙個的原理是一樣的 通過存點示教的方式記錄軌跡 然後再脫機執行 Q8:機械手臂歸零完成之後,有蜂鳴器長鳴一聲表示完成。軟體通信方面有沒有信號反饋?Api裡面有沒有? ANS:有的,歸零是隊列指令,然後使用與PTP一樣的查詢命令就可以了 Q9:為何我外部未連線,條件是EIO1-input=1,手臂它也會動作呢? ANS:軟體是逐行掃描的,且該行直到滿足觸發條件才運行 Q10:關於寫字的功能,單線條的字這個怎麽實現的呢 ANS:單線條字體客戶自己可以制作PLT or SVG文件或是可以參考一代機械臂的制作方法 http://cn.dobot.cc/tutorial/how-to-make-plt-file/27/26.html Q11:SetQueuedCmdStartExec(void)函數的作用,是否相當於按一下機械臂的Key按鍵?(Dobot Magician) ANS:和stopexec相對應,啟動/停止機械臂執行指令 Q12:在控制介面有沒有可能做到例如 t=0 時 我的角度在30度,然後t=1 角度=40,t=2 角度=50.....依此類推 ANS:角度控制沒法存點,只能是XYZ坐標系統 Q13:手臂能給予物件的最大壓力提出疑問,它能施加多少壓力呢? ANS:手臂用力大點的話就會導致丟步,建議200g以下的施力,跟人手敲鍵盤,滑手機的程度差不多 Q14:我想從PLC板子那外掛一顆藍芽模組,跟DOBOT裡的藍芽模組做配對連接,好讓我做想要的操控方式,可否提供藍芽模組配置規格型號,頻率,傳輸速率的資料呢? ANS:不需要這些信息,關鍵在於我們的藍芽模組是BLE的Server,那麽您要買的藍芽模組必須是BLE的Client,搜到我們的藍芽4.0的模組就行 藍芽版本4.0~4.2之間,支持主從模式的就可以 |
 RSS 訂閱
RSS 訂閱





品測科技股份有限公司 QTS Corporation
新竹縣竹北市嘉興路338巷8號1樓 No.8, Ln.338, Jiaxing Rd., Zhubei City , Hsinchu County 30264 ,Taiwan |
Copyright © 2023 品測科技股份有限公司 QTS Corporation All rights reserved.
|